Hip Exoskeleton Gait Research
Undergraduate research on variable-stiffness torsional hip exoskeletons to enhance human gait. Built custom MATLAB simulations of bipedal walking dynamics to inform experimental design.
Skills
Overview
I conducted undergraduate research in Vanderbilt’s Advanced Research and Control Laboratory investigating how variable-stiffness mechanisms at the hip joint could enhance natural human walking patterns.
The goal was to explore whether actively adjusting hip joint stiffness throughout the gait cycle could reduce metabolic cost and improve mobility—particularly for individuals with gait impairments.
Research Approach
My work focused on theoretical analysis and simulation to inform the experimental design of a physical hip exoskeleton system.
Variable-Stiffness Concept
The exoskeleton design uses a user-controlled variable-stiffness mechanism—similar to shifting gears on a bicycle—that allows the wearer to actively adjust hip joint stiffness based on walking conditions.
The key innovation is that stiffness varies throughout the leg swing period, with the user controlling when and how much to adjust stiffness to optimize their gait pattern for different terrains, speeds, or fatigue levels.
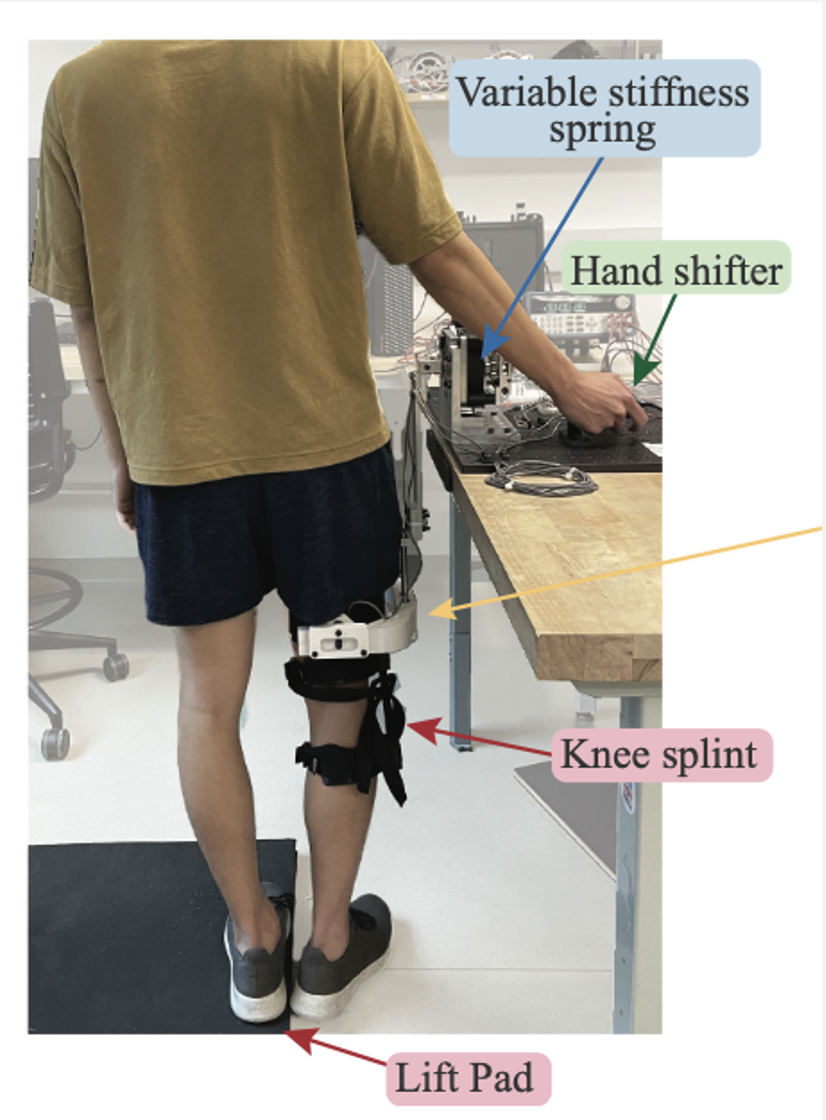
Physical exoskeleton prototype showing variable-stiffness spring mechanism, hand shifter for user control, knee splint for support, and lift pad
Simulation Development
I built custom MATLAB simulations of a bipedal walking model to analyze how variable hip stiffness affects gait dynamics.
Walking Model
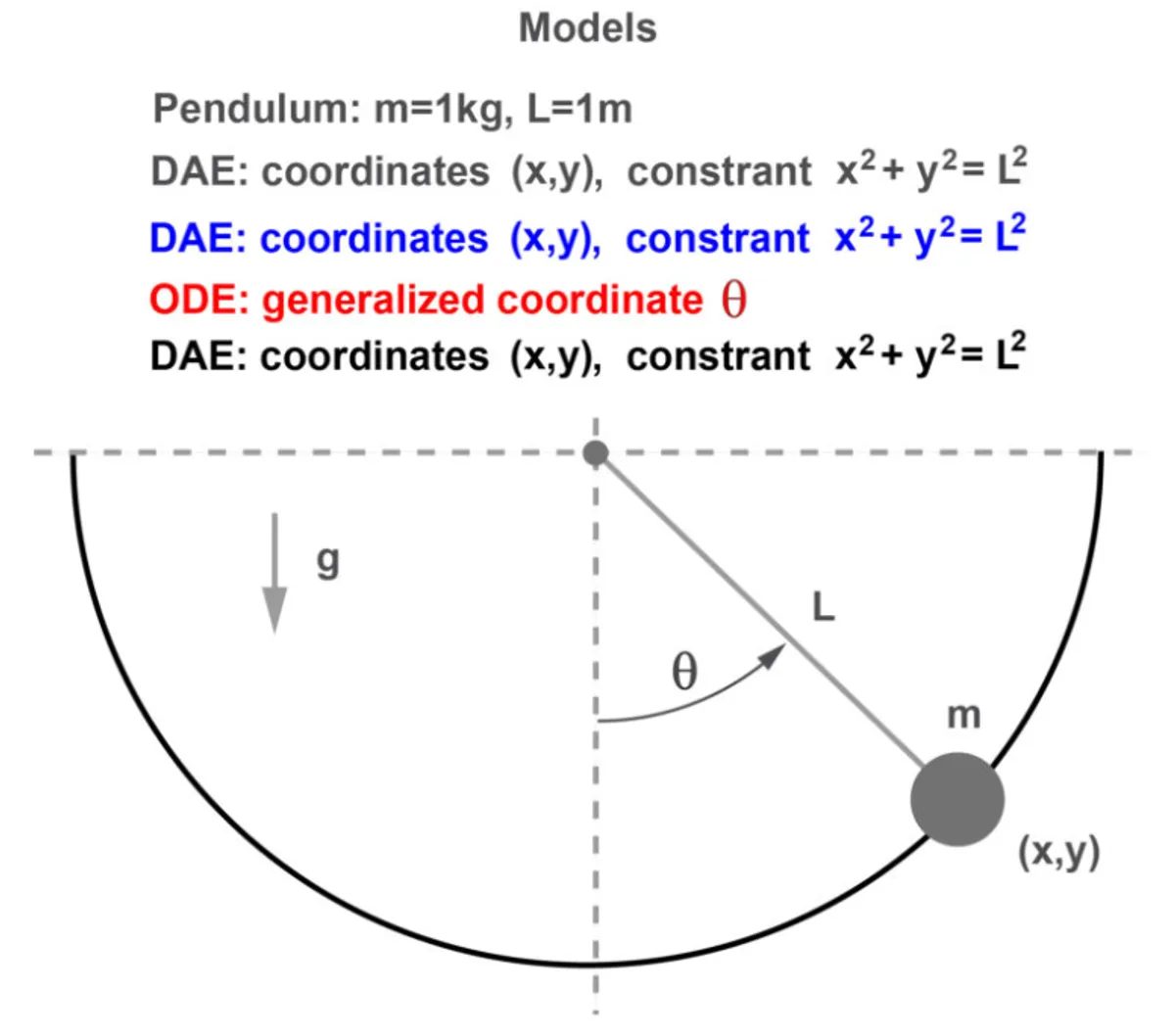
I implemented a simple inverted pendulum model to capture the fundamental dynamics of bipedal walking. This model represents the human body as a point mass atop an inverted pendulum (the stance leg), with the hip joint serving as the control point.
While simplified, this model is widely used in gait research because it captures the essential energy exchange and stability characteristics of human walking.
Analysis Focus:
- Dynamic stability throughout the gait cycle
- Energy efficiency with varying stiffness profiles
- Effect of stiffness modulation on step characteristics
- Sensitivity to user control timing
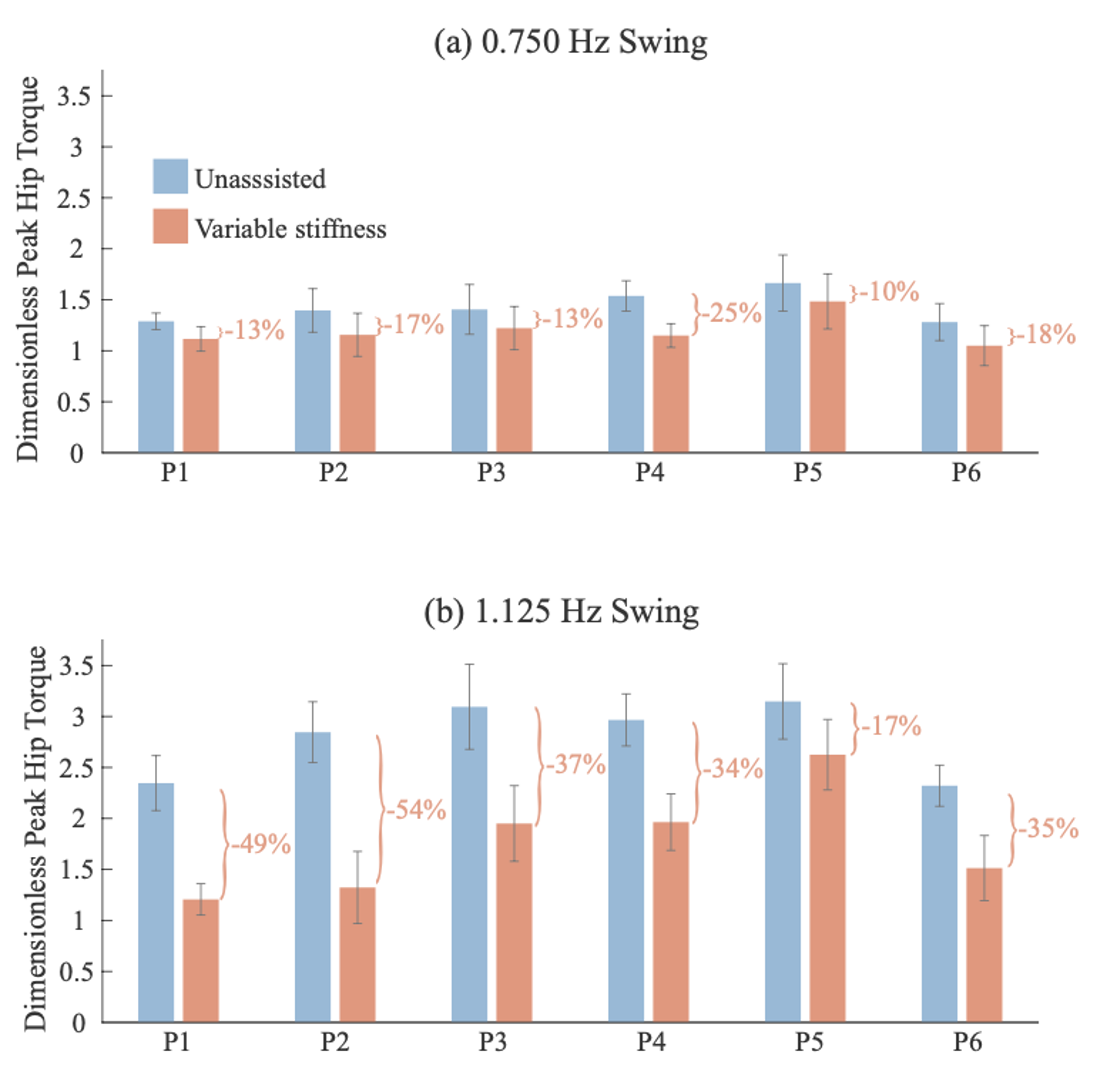
MATLAB simulation output showing gait dynamics with variable hip stiffness
Impact
This theoretical work served as a foundation for experimental validation with physical exoskeleton hardware. The simulation framework I developed enabled rapid iteration on control strategies and mechanical design parameters before committing to costly hardware fabrication.
The research contributes to the broader understanding of how assistive wearable robotics can be designed to work synergistically with human biomechanics, rather than simply imposing rigid actuation patterns.
Skills Developed
Through this project, I gained experience in:
- Dynamic systems modeling and simulation
- MATLAB programming for biomechanical analysis
- Research methodology and literature review
- Collaboration between theoretical and experimental work
- Technical communication with interdisciplinary teams